Written by: Kha Vi An Tran
At the University of Waterloo Alternative Fuels Team (UWAFT), research plays a critical role in bridging theoretical concepts with real-world vehicle applications. Through the EcoCAR EV Challenge, students are given the opportunity to explore advanced powertrain control strategies and validate them on a full-scale, competition-grade vehicle. This hands-on research environment allows students to see firsthand how academic theory translates into tangible engineering decisions that impact vehicle performance, efficiency, and user experience.
This project focuses on the application of an optimal torque split strategy for the Cadillac LYRIQ. Rather than treating torque distribution as a static or rule-based decision, UWAFT’s research investigates how optimization-driven control strategies can improve efficiency, drivability, and energy usage in the all-wheel-drive LYRIQ Through simulation, hardware-in-the-loop testing, and eventual on-vehicle validation, this work demonstrates how software-based research can directly influence real-world electric vehicle performance.
Within UWAFT, the Propulsion Controls and Modeling (PCM) subteam is responsible for developing the vehicle’s control logic, governing how power flows through the vehicle and how it responds to driver inputs. PCM focuses on designing, testing, and validating control strategies that balance efficiency, safety, and performance. This year, the subteam is leading research into optimal torque split strategies for LYRIQ, contributing directly to EcoCAR deliverables and vehicle-level integration. The research is led by Sean Vaserman, PCM Graduate Lead, and Hilus Keay, PCM Undergraduate Lead, with support from senior undergraduate students enrolled in ME599. ME599 is a project-based technical course that allows students to engage with real research problems tied directly to EcoCAR.

Why Research Optimal Torque Split Strategies?
Torque plays a fundamental role in vehicle motion, and in electric vehicles, how torque is distributed between motors has a direct impact on energy efficiency, vehicle stability, traction, drivability, and overall driving range. In dual-motor EVs, torque does not need to be split evenly. Instead, it can be allocated strategically between motors to ensure each operates closer to its most efficient region, allowing the vehicle to extract more performance and range from the same hardware.
An optimal torque split strategy determines how much torque each motor should deliver at any given moment in order to minimize energy consumption while maintaining smooth and predictable vehicle behavior. Unlike traditional rule-based strategies, optimization-driven approaches account for vehicle speed, requested torque, motor efficiency characteristics, and driveline coupling and decoupling states. This allows for more nuanced control decisions that adapt to changing driving conditions.
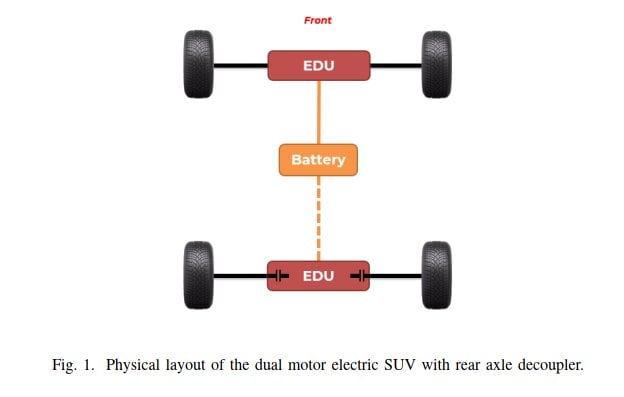
UWAFT’s EcoCAR’s LYRIQ equipped with two Magna electric drive units—one at the front axle and one at the rear. The rear motor features a mechanical decoupler that allows it to disconnect entirely when not required.
This architecture presents a unique opportunity to improve efficiency by reducing mechanical losses during light-load or coasting conditions, while strategically engaging motors only when beneficial. Understanding when and how to distribute torque between these motors is essential to improving overall vehicle efficiency and driving range.
From Research to Reality: The Role of Speedgoat
To develop and validate this research, UWAFT uses a Speedgoat real-time target. The Speedgoat is a real-time prototyping platform that allows control algorithms designed in MathWorks’ Simulink to run at real-time rates on vehicle hardware. While it does not decide the torque split itself, it is a critical enabler for developing, testing, and validating torque split controllers.
Using Speedgoat, the team can run control logic in real time, test front- and rear-motor torque allocation, implement torque vectoring and mode-based splits, and conduct hardware-in-the-loop testing. This environment allows vehicle dynamics, tire models, road conditions, and motor behavior to be simulated, making it possible to evaluate stability, responsiveness, and smoothness before on-road testing begins.

What does the Research Say?
Current research on dual-motor electric vehicles consistently shows that torque distribution has a measurable impact on energy efficiency, drivability, and overall vehicle performance. Traditional rule-based strategies are often designed for simplicity and calibration ease, but they fail to fully exploit the efficiency potential of dual-motor architectures—particularly when one axle can be mechanically decoupled. Recent studies indicate that optimization-driven torque split strategies can reduce energy consumption by placing each motor closer to its most efficient operating region. These studies also reveal predictable trends, such as near-symmetric torque splits during steady driving, front-motor bias during light-load conditions, and rear-motor bias during high-load or aggressive acceleration scenarios. UWAFT’s research aligns with this body of work by using offline optimization to evaluate large combinations of vehicle speed, torque demand, and driveline state, then translating these results into simplified real-time control logic suitable for vehicle implementation.
To frame this work within the broader research landscape, existing literature on dual-motor electric vehicles often explores optimization-based approaches such as Particle Swarm Optimization (PSO) to determine energy-efficient torque split strategies. PSO is a population-based optimization method commonly used in academic studies to evaluate how torque can be distributed between motors across different operating conditions.
While these techniques are typically applied offline and are too computationally intensive for direct real-time vehicle implementation, they provide valuable insight into how optimal torque distribution trends can be identified. This body of research informs UWAFT’s ongoing exploration of torque split strategies by highlighting the potential benefits of optimization-driven control and motivating future investigation into how such methods could be adapted for real-time, vehicle-ready applications.
UWAFT’s Research: Next Steps
The team’s next steps involve developing a script that generates a comprehensive map of optimal torque split values across operating conditions. For each combination of desired torque and vehicle speed, the script determines the most efficient front-to-rear torque distribution. This map will then be integrated into the vehicle’s real-time control logic and deployed on the Speedgoat platform for further testing and refinement, ensuring smooth, robust, and reliable performance under realistic driving conditions.
Through EcoCAR, UWAFT continues to demonstrate how student-led research can directly influence real vehicles and real engineering decisions. By combining theory, simulation, and hardware testing, the team is contributing to the future of efficient, intelligent mobility—one line of code at a time.
Interested in how student-led research is shaping the future of electric mobility? Follow UWAFT’s journey through EcoCAR.