Written by: Lisé Badeaux
Argonne National Laboratory’s Strategic Transportation Education Partnerships (STEP) department had a significant presence at the 2026 IEEE Transportation Electrification Conference and Expo, highlighting the lab’s role in advancing transportation research, experiential learning, and workforce development with the EcoCAR EV Challenge and Battery Workforce Challenge.
The conference, held June 10-12, brought together researchers, industry leaders, government partners, and university teams focused on the future of transportation electrification. For STEP, the event offers an opportunity to showcase how the U.S. Department of Energy’s Advanced Vehicle Technology Competitions are helping prepare the next generation of automotive engineers, battery experts, and mobility professionals.

Jesse Alley, EcoCAR Program Director, served as a keynote speaker for the session, “Developing the Automotive Workforce: Past, Present and Future.” His presentation highlighted Argonne’s leadership in managing DOE’s Advanced Vehicle Technology Competitions, including the EcoCAR EV Challenge, Battery Workforce Challenge, and upcoming EcoCAR Innovation Challenge.
“On top of its core function as a hands-on experiential learning exercise for students, EcoCAR provides a platform for various students to conduct research simultaneously across numerous domains,” said Alley. “The vehicles, components, tools, software, test time, industry subject matter experts provided by the program all support the work teams are doing.”
The keynote also spotlighted Argonne’s role in coordinating an international collaborative effort of government, industry, and university partners to deliver hands-on workforce development programs. Through these competitions, students gain experience solving complex technical challenges in areas such as vehicle electrification, battery systems, controls, software, project management, and communications.





Alongside Alley, STEP team members Ajay Suresh and Kayla Hamilton are also helping shape the conference’s technical program as session chairs and track chairs. In these roles, they supported the review process for submitted papers and posters, assigned reviewers and helped organize sessions that bring together research from across the transportation electrification field.
Thirty-one papers and posters from 15 EcoCAR EV Challenge and Battery Workforce Challenge university teams were accepted for presentation at ITEC. The accepted work reflects the technical depth of the student competition programs and the research contributions emerging from university teams across the country.
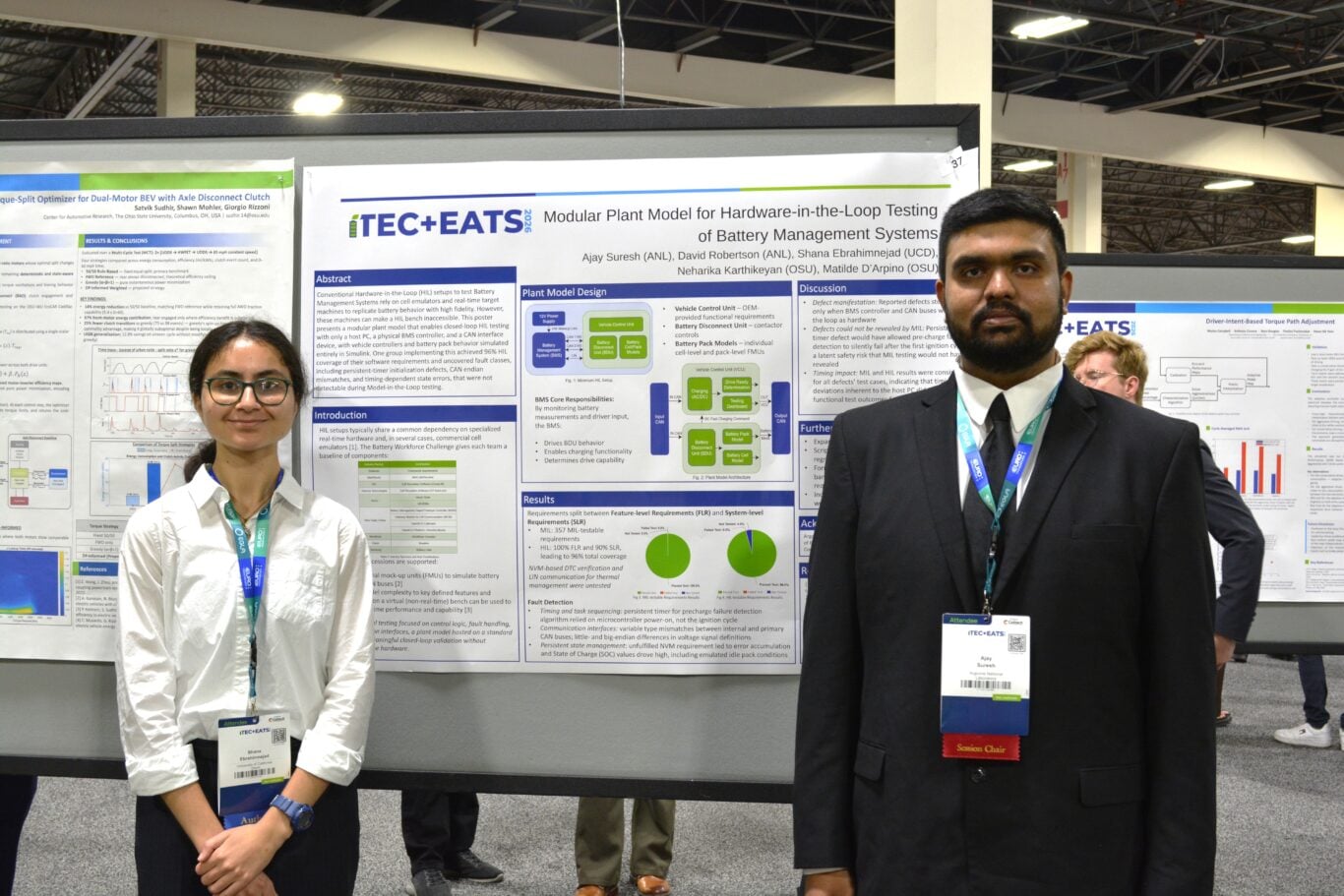
Suresh presented two technical posters in collaboration with Argonne’s David Robertson, Shana Ebrahimnejad from the University of California, Davis, and Ohio State University. The posters focused on a modular plant model for hardware-in-the-loop testing of battery management systems and a structured verification and validation framework for electric vehicle battery management systems.
UC Davis EcoCAR and STEP Intern alum, Shana Ebrahimnejad, said, “The work I did as part of my SULI internship at Argonne National Laboratory directly resulted in the posters I helped create and present. While I was a bit sad when I had to pass the project along, it’s been very rewarding to know that my work has had a tangible impact in the challenge.”
Alongside the research, the expo floor will also feature three student-built Cadillac LYRIQs from Embry-Riddle Aeronautical University and Bethune-Cookman University, the University of Waterloo, and Virginia Tech. The vehicles offered conference attendees a firsthand look at how students are applying classroom knowledge to real-world vehicle development.
For students, ITEC provides more than a venue to present technical work. It also offers exposure to industry leaders, professional researchers, and potential employers in transportation electrification.
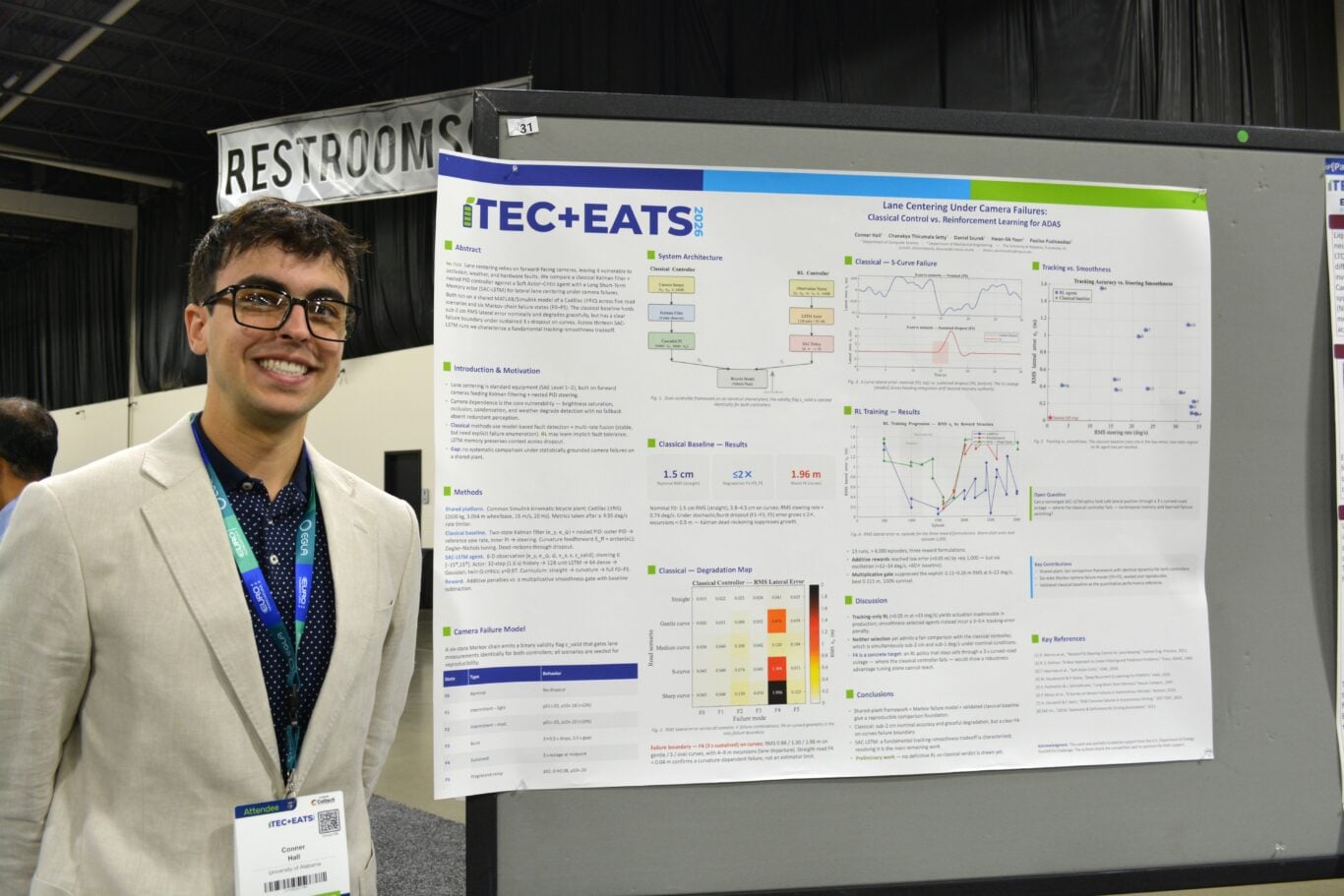
For University of Alabama EcoCAR graduate Conner Hall, the research he presented grew directly from the real-world testing challenges students encounter in the competition.
My research was at the intersection of lateral controls for lane centering and sensor fusion, two of the key tasks for the Connected and Automated Vehicles swimlane in the EV Challenge,” Hall said. “The result that reinforcement learning doesn’t cleanly dominate classical control under standard conditions, but behaves differently under failure, is actually a useful signal for production engineers and EcoCAR teams deciding where to invest their development time.”
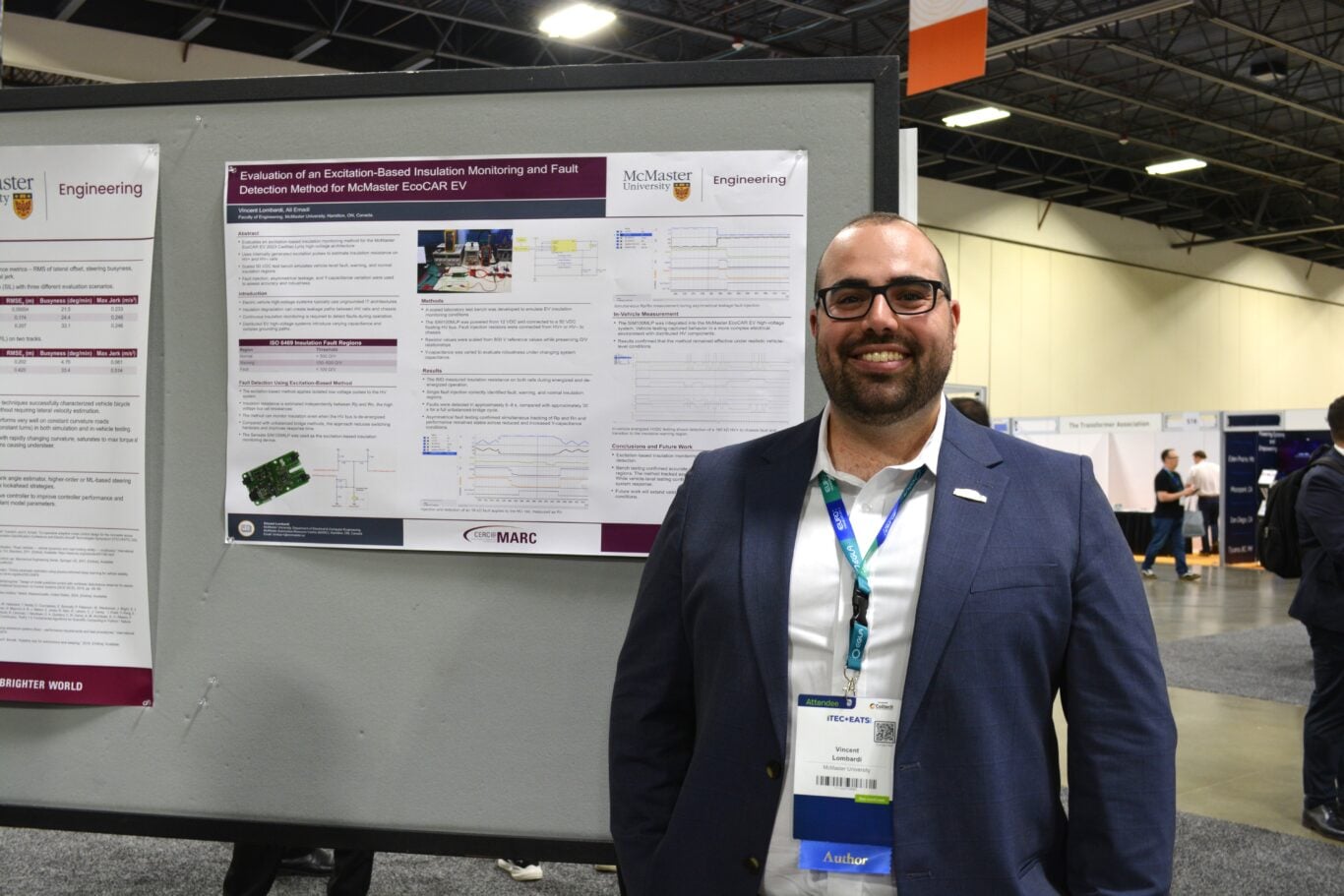
Another student research effort grew from a practical safety and measurement challenge in EcoCAR. For Vincent Lombardi from McMaster University, work to identify a high-voltage insulation monitoring solution led to a formal study of excitation-based insulation monitoring in electric vehicle systems.
“EcoCAR was really the starting point for this work,” Lombardi said. “The competition created the practical need, but as I dug into the technology, it became clear that excitation-based insulation monitoring had value beyond our vehicle, from battery packs to DC fast charging stations and other high-voltage systems where continuous fault detection is critical.”
Together, the STEP and AVTC presence at ITEC underscores the growing impact of Argonne’s workforce development programs. From the keynote stage to technical sessions and the expo floor, the department is highlighting how hands-on competition models can accelerate innovation while developing the workforce needed to support the future of transportation.
Thank you to the AVTC participants who showcased their research at ITEC 2026:














- Inrush Current Mitigation in MOSFET-Based Reconfigurable Battery Balancers Using Series Inductors — Caden Do, Jiangfeng Zhang, Xuan Zhou
- Battery Storage Optimal Design for Microgrid Applications — Harshad Balaji, Saroj Paudel, Jiangfeng Zhang, Rajendra Singh
- A Hybrid State of Charge Estimation Technique Using Gradient Boosted Extended Kalman Filter for Li-Ion Batteries — Azam Jaman, Md Nahid Islam, Ahmad Fuad, Md. Samiul Islam Sagar, Jaber Abu Qahouq
- Battery Workforce Challenge as a Platform for Hands-On Battery System Education — Duncan Tyree, Haofeng Su, Weixing Zhou, Azeem Hafeez, Xuan Zhou
- Design and Implementation of Robust State of Charge Estimation Approaches with Extreme Learning Machine — Nguyen Truong Son Pham, Mehrdad Kazerani, Yverick Pascal Rangom
- Structured Verification and Validation Framework for EV Battery Management Systems — Ajay Suresh, David Robertson, Shana Ebrahimnejad
- Modular Plant Model for Hardware-in-the-Loop Testing of Battery Management Systems — Ajay Suresh, David Robertson, Shana Ebrahimnejad, Neharika Karthikeyan, Matilde D’Arpino
- Robustness of an Adaptive Cruise Controller with Integral Action and Feedforward Compensation — Paul Barsa, Kallen Cunningham, David Taylor
- Slip Control of Dual Motor AWD Electric Vehicles for Optimum Longitudinal Performance — Kallen Cunningham, Paul Barsa, David Taylor
- Development Process of a One Pedal Driving Algorithm for an EcoCAR Cadillac LYRIQ — Daniel Edward, HaoJun Zhao, Lucas Rajotte, Ali Emadi
- Maximizing Regenerative Braking Energy Recovery for McMaster EcoCAR EV Through Dynamic Low-Speed Cutoff Point Detection — Lucas Rajotte, Ali Emadi
- A Combined STPA and ISO 26262 Approach for Safety Analysis of an EcoCAR Propulsion System — HaoJun Zhao, Nicholas Petrunti, Lucas Rajotte, Ali Emadi, Mark Lawford, Alan Wassyng
- Traffic Light Release Order Optimization for McMaster EcoCAR Automatic Intersection Navigation — Connor Ricotta, Ali Emadi
- String Stability Controller Design and Analysis for Co-Operative Adaptive Cruise Control — Dusan Petrovic, Samuel Khzym, Connor Ricotta, Ali Emadi
- Lane Centering Control Design for the McMaster EcoCAR Cadillac LYRIQ — Mina Nematiandoost, Samuel Khzym, Ali Emadi
- Evaluation of an Excitation-Based Insulation Monitoring and Fault Detection Method for McMaster EcoCAR EV — Vincent Lombardi, Ali Emadi
- Using Vehicle Trajectory Prediction to Improve Energy Efficiency with Cooperative Adaptive Cruise Control — Jacob Roberts, Sam Ball, Matthew Riggsbee, John Ball
- Real-Time Adaptive Torque-Split Optimizer for Dual-Motor AWD Electric Vehicles with Axle Disconnect Clutch — Satvik Sudhir, Shawn Mohler, Giorgio Rizzoni
- Gaussian Process-Based Model Predictive Control for Robust Autonomous Intersection Navigation Under Degraded V2I Communication — Daniel Szurek, Chanakya Thirumala Setty, Conner Hall, Hwan-Sik Yoon
- Adaptive MPC Weight Tuning via Reinforcement Learning for Eco-Driving: Framework and Oracle Gap Analysis — Chanakya Thirumala Setty, Daniel Szurek, Conner Hall, Hwan-Sik Yoon, Paulius Puzinauskas
- Lane Centering Under Camera Failures: Classical Control vs. Reinforcement Learning for ADAS — Conner Hall, Chanakya Thirumala Setty, Daniel Szurek, Hwan-Sik Yoon, Paulius Puzinauskas
- Driver-Intent-Based Torque Path Adjustment — Wesley Campbell, Anthony Ciccone, Ryan Douglas, Paulius Puzinauskas, Hwan-Sik Yoon
- Prototyping and Structural Evaluation of Motor Mounts in Vehicle Powertrain Systems — Anthony Ciccone, Wesley Campbell, Ryan Douglas, Paulius Puzinauskas, Hwan-Sik Yoon, Kyle Scott, Corban Walsh
- Model Predictive Control Using Data-Driven System Identification for Angle Regulation in Automotive Electric Power Steering Systems — Sahishnu Raju Kakarlapudi, Colin T. Scully, Shashank Mahesh, Christopher J. Nitta
- Eyes on Context: Intelligent Driver Monitoring System with Driving Scene Awareness — Mehak Saleem, Siyan Li, Marco Miralles, Eunjeong Hyeon, Guoyuan Wu, Hang Qiu, Matthew J. Barth
- Rule-Based Optimal Torque-Split Control Strategy for Dual-Motor All-Wheel Drive Electric Vehicles with Decoupler Cost — Jaeyoon Kim, Rishab Anand, Alex Huang, Junmin Wang
- Comparison of Optimal Control Approaches for Adaptive Cruise Control — Abhinav Gupta
- Vehicle Steering System Identification Using Liquid Time-Constant Neural Networks — Jacob Johnson, Almuatazbellah Boker
- Development of a Fuzzy Logic Rule-Based Energy Management System for a Dual-Motor Battery Electric Vehicle — Tony Weng, Scott Huxtable
- Development and Evaluation of Cooperative Adaptive Cruise Control Based on Attenuative Kerner’s Model — Jared Behr, Homer Butcher, Dalton Wiggins, Brian Woerner, Andrew Nix
- Simulation of a Deep Reinforcement Learning-Based Traffic Signal Control — Jared Diethorn, Jared Behr, David Burley, Brian Woerner, Andrew Nix