
When the Virginia Tech Hybrid Electric Vehicle Team faced limited vehicle testing opportunities and a major high-voltage setback, students turned to artificial intelligence to solve one of their toughest technical challenges. Their solution earned national recognition at the Year 4 EcoCAR EV Challenge competition, where Virginia Tech received the 1st Place Argonne AI Innovation Award for its innovative use of AI in Lane Centering Control (LCC).
Developed by Argonne National Laboratory, the Argonne AI Innovation Award provides a dedicated platform for EcoCAR teams to showcase how they use artificial intelligence to advance mobility, energy systems, and engineering research. The award recognizes student teams that apply AI in creative, practical, and technically rigorous ways, from vehicle controls and software development to project management and workflow automation.

For Virginia Tech, the winning project focused on a real-world challenge in Connected and Automated Vehicles (CAV) with the team’s LCC. LCC helps keep a vehicle centered within its lane by using front-facing cameras to detect lane lines by applying steering torque to reduce lateral deviations. This technology can improve vehicle stability and reduce driver fatigue, especially during longer drives. Building an effective lane-centering controller required the team to accurately model the vehicle’s electronic power steering system. But without access to all of the physical steering parameters and with limited opportunities for vehicle testing, students needed a different approach to develop and validate their controller.
Jacob Johnson, the team’s Connected and Automated Vehicles lead, built on previous work to create a new AI-based steering model using a Liquid Time-Constant network. The model allowed the team to better account for nonlinear vehicle behavior and the different operating frequencies of the stock steering controller and the team-designed controller.
“The vehicle steering system has many nonlinearities, and to model the system correctly, you need many physical parameters that we didn’t have access to,” Johnson said. “AI enabled us to create an accurate model without expensive testing equipment and facilities.”
The need for simulation became even more urgent when the team experienced a critical high-voltage failure and had to send their Cadillac LYRIQ to General Motors for replacement of the rechargeable energy storage system. Without the vehicle available for testing, students had to find another way to tune the lane-centering controller before competition. That is where the AI model changed the outcome.
Johnson and his team used the steering model to create a simulation environment and applied Bayesian optimization to tune the controller. The approach allowed the team to evaluate performance and adjust controller parameters based on the same scoring requirements used during competition.
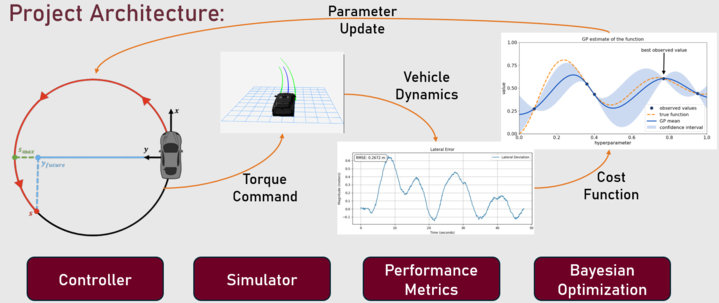
He got the optimizer working during the first week of competition and ran it overnight before the Lane Centering Control event. When the team tested the AI-tuned controller against hand-tuned values, the difference was clear.
Johnson said, “The AI solution enabled us to tune our controller in simulation, even without the car. An hour before the event, we tested our hand-tuned lane-centering controller versus the AI-tuned controller, and the difference was night and day. It was amazing to see it go from swerving to smoothly centering and turning perfectly.”
“This year’s presentations showcased intentional, impactful, and technically grounded AI applications across mobility challenges, software development, connected and automated vehicle controls, and project management,” said Ajay Suresh, Strategic Transportation Education & Partnerships (STEP) Project Engineer, Argonne National Laboratory. “The Virginia Tech team distinguished themselves by clearly identifying a system constraint, thoughtfully justifying its use of a Liquid Time-Constant model, and demonstrating why alternative approaches were insufficient. The team’s implementation of Bayesian optimization directly aligned controller tuning with competition scorecard metrics, and the testing results demonstrated success in meeting vehicle technical specification targets.”

For Johnson, the award represented more than a successful technical solution. It showed how students can use AI to solve complex mobility challenges in ways that are both rigorous and practical.
“To me, the AI Innovation Award means we took a hard problem and solved it in a unique way that pushes the industry forward,” Johnson said. “It’s recognition from one of the country’s leading research institutions that the AI we developed and deployed was a meaningful contribution to our field.”
The team plans to continue improving and validating the simulator with ground-truth data from vehicle-in-the-loop testing, further refine controller parameters with Bayesian optimization, and validate the controller in the vehicle.
Through the Argonne AI Innovation Award, Argonne National Laboratory is helping to spotlight the next generation of engineers who use artificial intelligence not as a shortcut but as a tool for deeper problem-solving, smarter testing, and more advanced vehicle performance.
“One of the most exciting aspects of this award is seeing students identify unique opportunities to apply AI to real engineering challenges,” said Suresh. “Each year, EcoCAR teams continue to find new and creative ways to use artificial intelligence to improve vehicle performance, accelerate development, and solve problems that would otherwise be difficult to address through traditional approaches. Virginia Tech’s project is an excellent example of how students are using AI not as a novelty, but as practical engineering solutions.”
For Virginia Tech, that meant turning a setback into a smoother ride and an award-winning example of what AI can make possible in the future of mobility.



